- Kullanılan kablo
- Doğrulama Talimatları
- K-CAN, PT-CAN, F-CAN'ın osilografisi
- K-CAN, PT-CAN ve F-CAN dirençli direnç ölçüm sırası
- K-CAN
- PT-CAN, F-CAN
- Dikkat!
- CAN bus çalışmıyor
Bu kılavuz, CAN'ın yüksek seviye sinyalinin ve CAN sinyalinin düşük seviyesinin bus bağlantısına doğru şekilde iletildiğini doğrulamak için kullanılır.
Kullanılan kablo
Çok işlevli kablo
Doğrulama Talimatları
- Gerilim testi (osiloskop): Gerilimi kontrol etmek için akü bağlı olmalı ve kontak açık olmalıdır.
- Direnç Ölçümü: Direnç ölçülürken, ölçülecek nesnenin ölçümden önce enerjisinin kesilmesi gerekir. Bunu yapmak için, akü bağlı değil. Sistemdeki tüm kapasitörlerin boşalması için 3 dakika bekleyin.
CAN bilgisi
CAN veri yolu (Kontrolör Alan Ağı), aşağıdaki özelliklere sahip bir seri veri yolu sistemidir:
- sinyal yayılımı her iki yönde de meydana gelir.
- Her mesaj tüm otobüs aboneleri tarafından alınır. Her otobüs abonesi mesajı kullanıp kullanmayacağına karar verir.
- Ek veri yolu aboneleri basit paralel bağlantı ile eklenir.
- Bus sistemi şoförlü bir sistem oluşturur. Her veri yolu abonesi, bir verici mi yoksa alıcı olarak mı bağlı olduğuna bağlı olarak bir sürücü veya bir aktüatör olabilir.
- İletim ortamı olarak iki kablolu bağlantı kullanılır. Kablo tanımlamaları: Düşük ve yüksek CAN.
- Kural olarak, her veri yolu abonesi diğer veri yolu aboneleri ile veri yolu üzerinden iletişim kurabilir. Veri yolundaki veri alışverişi erişim kurallarına tabidir. K-CAN veri yolu (gövde CAN veri yolu), PT-CAN veri yolu (motor ve şanzıman CAN veri yolu) ile F-CAN veri yolu (şasi CAN veri yolu) arasındaki temel fark:
- K-CAN: veri aktarım hızı yakl. 100 Kb / sn Tek tel mümkün.
- PT-CAN: veri aktarım hızı yakl. 500 Kb / sn Tek tel modu mümkün değildir.
- F-CAN: veri aktarım hızı yakl. 500 Kb / sn Tek tel modu mümkün değildir.
Sürücü: Sürücü, iletişim girişiminin kaynaklandığı aktif bir iletişim ortağıdır. Sürücü önceliklidir ve iletişimi kontrol eder. Bus sistemi üzerinden pasif veri yolu abonesine (aktüatör) mesaj gönderebilir ve talep üzerine mesajlarını alabilir.
Aktüatör: Aktüatör pasif bir iletişim üyesidir. Veri almak ve iletmek için bir komut alır.
Ana cihazlı sistem: Ana cihazlı bir sistemde, iletişim katılımcıları belli bir zamanda ana veya aktüatör rolünü üstlenebilirler.
K-CAN, PT-CAN, F-CAN'ın osilografisi
Daha fazla netlik için CAN veriyolunun kusursuz çalışıp çalışmadığını, veri yolu iletişimini izlemeniz gerekir. Aynı zamanda bireysel bitleri analiz etmeye gerek yoktur ve sadece CAN veriyolunun çalıştığından emin olmanız gerekir. Osilografi: “CAN veriyolu açık bir şekilde bozulmadan çalışıyor”.
Bir voltaj osiloskopu ile ölçüm yaparken, bir CAN (veya yüksek CAN-Yüksek) düşük seviyeli kablo ve toprak, voltaj aralığında bir kare dalga sinyali alır:
K-CAN:
Kütleye göre düşük CAN seviyesi: U min = 1 V ve U maks = 5 V
Kütleye göre yüksek CAN seviyesi: U min = 0 V ve U maks = 4 V
Bu değerler yaklaşıktır ve veri yolu yüküne bağlı olarak 100 mV'a kadar değişebilir.
K-CAN'da ölçüm için osiloskop ayarları:
CH1: Prob 1, Derece 2 B / div; DC DC2 bağlantısı: Prob 2, Derece 2 V / div; DC bağlantı Süresi: 50 ms / div

Şek. 1: K-CAN ölçümü: CH1 düşük CAN seviyesi, CH2 yüksek CAN seviyesi
Bir voltaj osiloskopu ile ölçüm yaparken, bir CAN (veya yüksek CAN-Yüksek) düşük seviyeli kablo ve toprak, voltaj aralığında bir kare dalga sinyali alır:
PT-CAN ve F-CAN
Kütleye göre düşük CAN seviyesi: U min = 1.5 V ve U max = 2.5 V
Kütleye göre yüksek CAN seviyesi: U min = 2.5 V ve U max = 3.5 V
Bu değerler yaklaşıktır ve veri yolu yüküne bağlı olarak 100 mV'a kadar değişebilir.
PT-CAN (veya F-CAN) ölçümü için osiloskop ayarları:
CH1: Prob 1, Sıra 1 B / div; DC DC2 bağlantısı: Prob 2, Sınıf 1 V / div; DC bağlantı Süresi: 10 ms / div 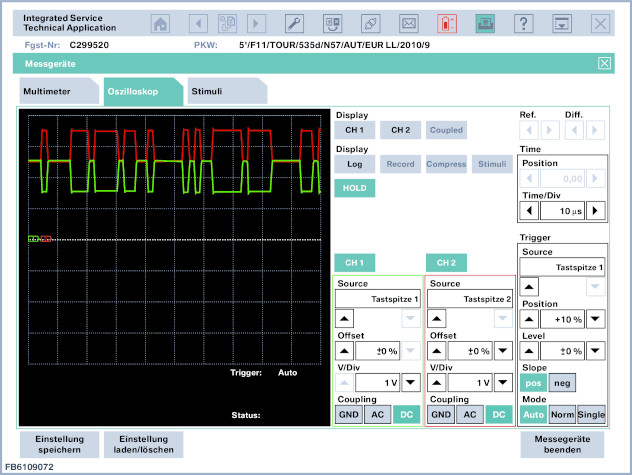
Şekil 2: PT-CAN Ölçümü: CH1 Düşük CAN, CH2 Yüksek CAN
K-CAN, PT-CAN ve F-CAN dirençli direnç ölçüm sırası
Direnç ölçümünü kontrol etme işlemi:
- CAN veri yolunun enerjisi kesilmiş olmalı
- Başka hiçbir ölçüm cihazı bağlanmamalıdır (ölçüm cihazlarının paralel bağlantısı)
- Ölçüm CAN düşük seviye ve CAN yüksek seviye teller arasında yapılır.
- Gerçek değerler belirtilen değerlerden birkaç ohm arasında farklılık gösterebilir.
K-CAN
K-CAN veriyolunda ayrı bir direnç ölçümü yapılamaz, çünkü direnç bilgisayarın anahtarlama mantığına bağlı olarak değişir!
PT-CAN, F-CAN
Sinyalin yansımasını önlemek için, iki CAN veri yolu abonesi (PT-CAN ağında maksimum mesafeyle) 120 Ohm dirençle yüklenir. Her iki yük direnci de paralel olarak bağlanır ve 60 ohm'a eşdeğer bir direnç oluşturur. Besleme gerilimi bağlı değilken, bu eşdeğer direnç veri hatları arasında ölçülebilir. Ek olarak, bireysel dirençler ayrı ayrı ölçülebilir.
60 ohm dirençli ölçüm talimatları: Kolayca erişilebilen bir bilgisayarı lastikten ayırın. Konnektördeki düşük ve yüksek CAN kabloları arasındaki direnci ölçün.
Dikkat!
Tüm araçların CAN veriyolu üzerinde sonlandırma direnci yoktur, bağlı araçtaki yerleşik sonlandırma direncinin varlığı uygun bağlantı şeması kullanılarak kontrol edilebilir.
CAN bus çalışmıyor
K-CAN veya PT-CAN veri yolu çalışmıyorsa, kısa devre veya yüksek veya düşük CAN kablosu kopmuş olabilir. Veya hatalı ECU.
Arızanın nedenini belirlemek için aşağıdaki gibi devam etmeniz önerilir:
- Arıza sebebi olan bir blok bulunana kadar CAN veri yolu abonelerinin bağlantısını kesin (= ECU X).
- Kısa devre veya açık devre için X bilgisayar kablolarını kontrol edin.
- Mümkünse, ECU X'i kontrol edin.
- Böyle bir işlem sırası, yalnızca kısa devre bilgisayardan CAN veriyoluna doğrulanabilir bir kabloya sahipse başarıya ulaşır. CAN veriyolundaki telin kendisinde kısa devre varsa, kablo demetini kontrol etmeniz gerekir.
Tipografik hatalar, anlamsal hatalar ve teknik değişiklik yapma hakkı saklıdır.
